
 Tuan Nguyen
0b94669d6e
make sure pattern finish is signaled.
Tuan Nguyen
0b94669d6e
make sure pattern finish is signaled.
|
1 vuosi sitten | |
|---|---|---|
| .github | 1 vuosi sitten | |
| dune_weaver_flask | 1 vuosi sitten | |
| firmware | 1 vuosi sitten | |
| modules | 1 vuosi sitten | |
| patterns | 1 vuosi sitten | |
| static | 1 vuosi sitten | |
| steps_calibration | 1 vuosi sitten | |
| templates | 1 vuosi sitten | |
| .env.example | 1 vuosi sitten | |
| .gitignore | 1 vuosi sitten | |
| CHANGELOG.md | 1 vuosi sitten | |
| Dockerfile | 1 vuosi sitten | |
| LICENSE | 1 vuosi sitten | |
| PATTERN_CREDITS.md | 1 vuosi sitten | |
| README.md | 1 vuosi sitten | |
| app.py | 1 vuosi sitten | |
| docker-compose.yml | 1 vuosi sitten | |
| mirror_pattern.py | 1 vuosi sitten | |
| requirements.txt | 1 vuosi sitten | |
| test_websocket.py | 1 vuosi sitten |
README.md
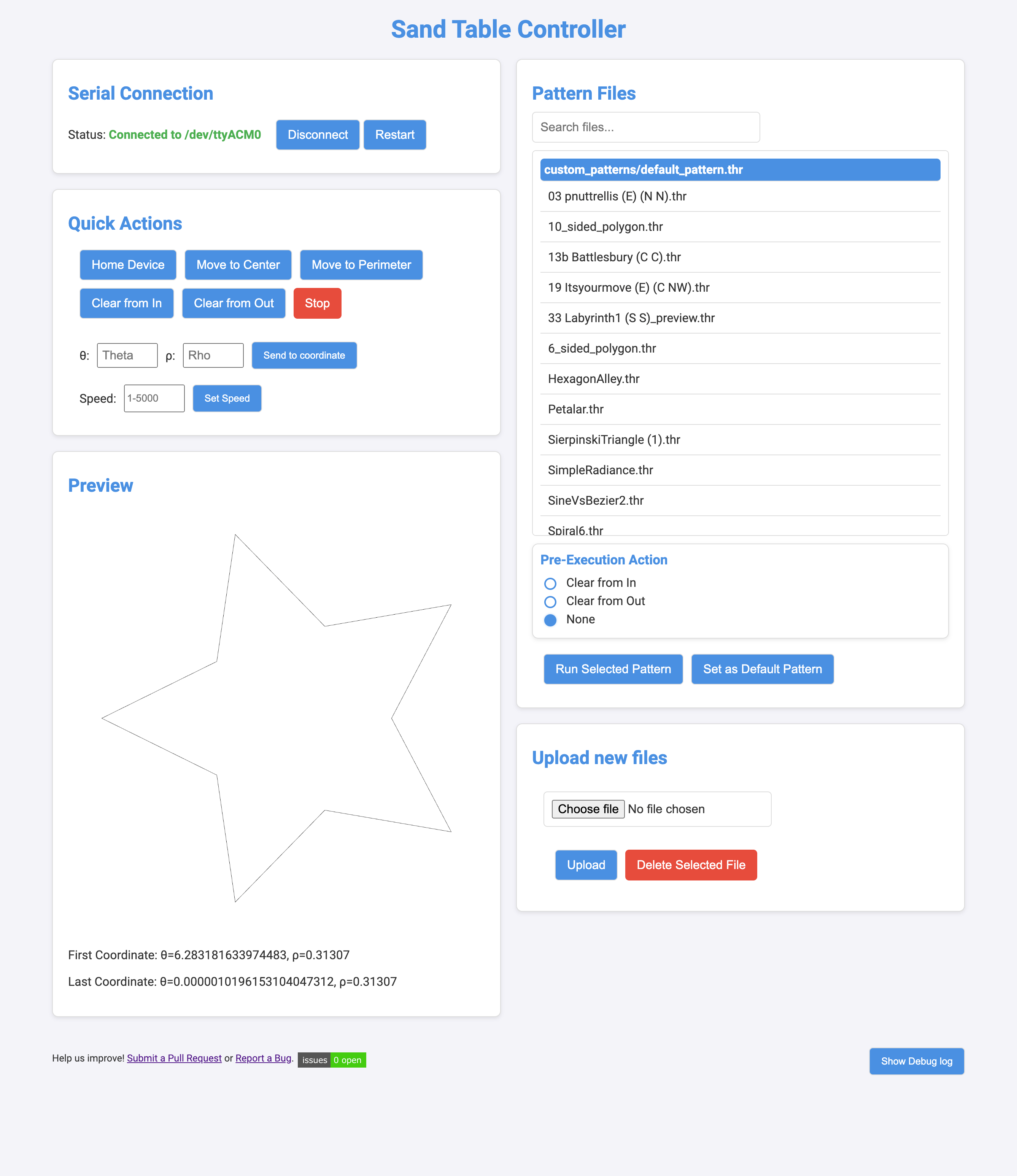
Dune Weaver

Dune Weaver is a project for a mesmerizing, motorized sand table that draws intricate patterns in sand using a steel ball moved by a magnet. This project combines hardware and software, leveraging an Arduino for hardware control and a Python/Flask-based web interface for interaction.
Features
- Theta-Rho Coordinate System: Supports theta-rho pattern files to generate smooth, intricate designs.
- Web-Based Control: Easily upload, preview, and execute patterns via a Flask-based web interface.
- Batch Execution: Optimized batching for smoother table movement.
- Pre-Execution Actions: Configurable pre-execution clearing actions.
- Arduino Integration: Communicates with the Arduino over serial for precise movement control.
- Real-Time Monitoring: Continuously reads and displays Arduino responses.
Technologies Used
- Python: Backend application logic and web server.
- Flask: Lightweight web framework for serving the UI and handling API calls.
- Arduino: Handles the motor control for the sand table.
- Serial Communication: Facilitates communication between Python and the Arduino.
Setup Instructions
Hardware Requirements
- A sand table with:
- A stepper motor
- Magnet for moving the steel ball
- Arduino Uno (or compatible microcontroller).
- DRV8825 motor driver (or an alternative for quieter operation).
- Power supply and necessary wiring.
- Computer with USB connection to the Arduino.
Software Requirements
- Python 3.7+
- Arduino IDE
- Flask
- Serial communication libraries
Installation Steps
Clone the repository:
git clone https://github.com/tuanchris/dune-weaver.git cd dune-weaverInstall the required Python libraries:
pip install -r requirements.txtSet up your Arduino: • Flash the Arduino with the provided firmware to handle serial commands. • Connect the Arduino to your computer.
Run the Flask server:
python app.pyAccess the web interface: Open your browser and navigate to http://localhost:8080.
File Management
• Patterns: Save .thr files (theta-rho coordinate files) in the patterns/ directory. • Uploads: Upload patterns via the web interface.
Pattern File Format
Each pattern file consists of lines with theta and rho values (in degrees and normalized units, respectively), separated by a space. Comments start with #.
Example:
# Example pattern
0 0.5
90 0.7
180 0.5
270 0.7
API Endpoints
The project exposes RESTful APIs for various actions. Here are some key endpoints: • List Serial Ports: /list_serial_ports (GET) • Connect to Serial: /connect (POST) • Upload Pattern: /upload_theta_rho (POST) • Run Pattern: /run_theta_rho (POST) • Stop Execution: /stop_execution (POST)
Project Structure
dune-weaver/
├── app.py # Flask app and core logic
├── patterns/ # Directory for theta-rho files
├── static/ # Static files (CSS, JS)
├── templates/ # HTML templates for the web interface
├── README.md # Project documentation
├── requirements.txt # Python dependencies
└── arduino/ # Arduino firmware
Happy sand drawing with Dune Weaver! 🌟